Attention Lady(s), Gentlemen, Fabricators, Engineers, Gearheads, Petrolsexuals, Nerds, Geeks, Speed Junkies, and The Sausage Creature:
I'm building a motorcycle from scratch. I've been describing so far it as a "Largely-spartan long-haul sport standard".Why? Factory-built bikes won't kill me soon enough; Telescoping forks keep me up at night; I need to keep myself sane through another salt-belt winter; I want something badass to ride off into the sunset on after I rage-quit my job...take your pick.
So, here's my wish list in no particular order:
- Top speed minimum of 117mph. That should be enough that when I'm wringing 'er out in a tuck I might glimpse a reminder of what fast fast feels like
- Good sound at constant revs for miles. I'm going places on this moto
- Hossack front end. Why? Tubular forks suck for road motorcycles
- 200 mile range to 'reserve' (Probably 250 total range)
- Quicker than 5 kg per kW (8.15lbs. per HP) fully hydrated. That's a 375lb motorcycle delivering 46HP. Yup, this requirement is vague, because torque will give me area-under-the-curve (which is the good stuff). 34kW is probably about enough to hit my speed requirement without bodywork, though
- Comfortable (enough) for long days/weeks of riding. I'm young, stubborn, fit, and lightweight, so this basically means the seat has to be great and the ergonomics have to be good.
- Has to be capable of hauling the fucking mail in the twisties. This generally means predictable behavior from good geometry, well-setup springs/dampers, correct rubber and good front brakes. I can ride around other details.
Where to start?
Points.
The points in space that govern wheelbase, suspension/chassis geometry (like steering axis), ride height, rider triangle, etc. are the first tangible bits of information I need. Around those I can then find suspension forces, component placement, hose/tube/wiring routing, etc. From there it's chassis/frame design, swingarm/upright design, wheel/tire selection, damper/spring selection, paint color, and sarcastic key tag verbiage.
Cool, but that's, like, still a lot of stuff to figure out, man...
Well, to design suspension geometry, you need to know basic size and shape stuff - wheelbase, tire diameter, mass, center of gravity.
Center of gravity means I need to know the heavy components and their locations - Wheel assemblies, rider, fuel tank, battery, springs/dampers, engine.
The engine is a fun one to talk about, so I'll start there.
ENGINE SELECTION
Singles: NOPE, wrong sound. Listen, haters, I get it: I own a DR650 that I both enduro and supermoto. I understand the thumper life. They are torquey, simple, light, reliable - they make sense; people love them. Hell, there's a website of ~400k people dedicated to just talking about the fucking things. But, they sound blatty and knocky, which is an aural sandpaper I love rubbing in other people's ears when I'M the one twisting the giggle tube, but long hours sputtering along isn't so much fun. Besides, they fall a bit short on my horsepower needs for top speed without being built, which would be an additional four budget digits and weeks more work.
Inline Fourbangers: OUT, due mostly to packaging and complexity. They are all too wide to fit between your legs in an upright seating geometry. The simple ones are all too old to find good donor bikes, and the modern ones are fucking complex (my Gixxer6 track bike has 8(!) throttle bodies, and what seems like 30 goddamn fuel injectors).
Obscure Shit: V4, Triples, Wankels, I6s, Diesels, Gas Turbines - NO, due to lack of donor bikes/parts/internet knowledge/smell/availability of jetfuel.
So, it follows logically...
Twins: Bingo. They sound right (My GS500, despite being 180*, sounds pretty good when flogged), there are a ton of combinations of cooling/configuration/displacement/donor bike for me to choose from, they are narrow-to-medium narrow, and they fall right into my power target.
But what kind of twin?
HD are out. Even the modern ones are heavy and the gearboxes suck. Yes, that includes the XB motors. Most of those need new cranks that won't explode anyway.
The old parallel 650s (like the XS650) are getting long in the tooth, and don't actually make great power (they are on par with modern-ish 650 thumpers). The large-displacement triumph parallel twins are cool, but good donor bikes are expensive, and the chain drive is on the wrong side which can fight me in wheel options.
Sportbike Vtwins wouldn't be a bad option technically, the SV650 motor is stout and light, but honestly I think it's ugly. My friends track/race them all the time, and I've never enjoyed looking at one. Too much empty space behind the front wheel. Ducatis really do have character in spades, but they also come with a price premium. I've probably just not spent enough time on one to drink the Koolaid, but I still don't want to own one. EBR Rotax motor? No thanks, Mr. Moneybags.
Sportbike parallel twins (Duke 790, Ninja 650, etc.) are also arguably ugly, but they are the most power-efficient and size-efficient twins available. The 790 is too new to be affordable for this project, and the Ninja just isn't the sound I'm looking for. Blame the 180* crank. Will I end up paying a 25kg+ weight penalty for the same output from some other type of motor? Well...
All this leads me to metric cruisers - Japanese-made narrow-angle Vtwins. And if I want it to be chain drive, that leaves me with just one motor - the Kawasaki Vulcan VN800.
 |
| Disembodied Vulcan Lump |
I picked up a donor bike for $1.5K, and I had no emotional regrets ripping its heart out. Just the nerf bars, miscellaneous bracketry, and gauge cluster weighed damn near 50lbs. How long have humans known about aluminum? Someone should have told Kawasaki.
What of the other "heavy" bits?
Flushing out the other major heavy bits take far less brain effort than motor selection. I'll explain later how I found the weights of each part, plus the real effort - how I found the center of gravity of each part.
Geometry Numbers Selection
 |
| It's now a fucking heavy scooter. Fun fact: the front brake has been locked up the whole time. Makes a poor sled... |
Flushing out the other major heavy bits take far less brain effort than motor selection. I'll explain later how I found the weights of each part, plus the real effort - how I found the center of gravity of each part.
Geometry Numbers Selection
There are a number of parameters I have to choose. Here they are below, and what they control on the bike:
- Wheelbase - the distance along the ground between the two tire contact patches. Shorter motos turn smaller arcs per steering angle, bottom out on higher obstacles per ride height, but also pitch (wheelie and stoppie) more per CoG height than longer motos.
- Trail - How far in front of the front tire's contact patch the imaginary steering axis touches the ground. More trail means the bike fights more to return to upright while leaning, and fights more to initiate a turn.
I chose my numbers for the above by comparing the geometry of many motorcycles, most of which I've ridden, on a big spreadsheet. I want my bike to tip-in and turn closely to the agility of my Gixxer and GS500, but I'm going to dial that back probably 20% for the sake of stability in a straight line. Right now, I think WB = 1500mm and Trail = 105mm, which puts me just about FZ-09/RnineT Trail with 50mm more Wheelbase.
So, it follows that I will choose whatever rake angle works the best with the suspension design, and also possibly what looks best when the upright is designed (this isn't a race bike build, and I'm not a slave to theoretical optimization. I'm a practical man!)
- Rake Angle - the angle the steering axis makes with the ground. This one is interesting for two reasons - one, because it changes use of the front tire in some very interesting ways; two, bikes with telescoping front forks have rake angle highly dependent on required trail. The Mathbike will have a Hossack front end, so I can change rake to whatever I want.
Alright, so what's this Hossack front end stuff about?
Norman Hossack's bikes, as well as the BMW Duolever bikes, have this double-wishbone geometry connected to an "upright" - a rigid fork that holds a regular wheel and brakes. Having those links instead of sliding fork tubes makes the bikes handle far better.
- Less stiction over bumps,
- Trail/Rake that doesn't change from bumps and braking unless you design it explicitly to do so
- No 'dive' under braking (and therefore softer springs for more grip!)
- Better control of chassis stiffness (fork tubes are equally strong in all directions, which is not great when you want the chassis to flex a bit in some directions, but not others),
- ...I also think they look dope. I like linkages and tubes. Blame the ex-racecar-builder in me
Mathbike has a small modification to the design: usually, the steering axis is truly imaginary, as a line between two balljoints/rod ends at the ends of the wishbones. Balljoints have a lot of stiction - not a problem for cars (or 600# BMW touring bikes with large trail numbers) but possibly a problem for my bike (~350#?, small trail number). Rod end/spherical bearings don't like to last - ask anyone with a 4-link wheeling rig, rod ends are basically a wear part (gritty trails or not). Instead, I'm going to float a traditional head tube at the ends of the wishbones (full disclosure: it will be inside-out, with the "steering tube" fixed to the links, and the "head tube" fixed to the "upright").
If Hossack are so much better, why is everyone using telescoping forks? Fair question. On dirtbikes, a slacked-out long-travel fork is great, because the front axle moves backwards into the bike almost as much as it moves upwards. This means, when absorbing a bump, the front wheel actually momentarily slows down in relation to the rest of the bike, allowing more time and requiring less energy to roll over the bump. This is even more pronounced on downhill mountain bikes where energy conservation/roll speed is first-priority (some DH MTB frames, like the Canfield Jedi, even have rear suspensions designed with dramatic rearward-axle-path to give the rear wheel this same advantage as an angled fork). Road-moto bumps rarely approach the axle-height size of dirt/trail bumps, so a vertical axle path isn't as large a disadvantage.
Why do streetbikes use telescopics, then? Dumb history and laziness. Hydraulic damping was originally only possible in telescoping forks, in the days when friction damping was a much larger problem than sticky, diving, flexible front suspensions. Since then, forks are just easy and predictable. Telescoping fork design has gotten pretty damn good, but fundamentally the concept is flawed.
So, since mathbike rake isn't tied to mathbike trail, now what? Does the rake number even matter?
As it turns out, rake angle does change how the front tire is used, much in the same way that caster on a car upright does. However, because motorcycle tires act more like spheres than cylinders (car tires), and since the whole suspension is turned on its side during cornering, the effects are greatly reduced.
First, of note, the "lean angle of the bike" is not the same as the "lean angle of the front tire" during cornering. By the same token, the "handlebar angle" does not equate to the "steering angle of the front tire" during cornering. This is because of the interaction between the three constituent angles (rake angle, handlebar angle, lean angle) changes what part of the tire touches the ground (actually leading to minute changes in wheel base at the same time).
I wrote some python code to calculate how far the front tyre leans during cornering when two rake angles are compared. Turns out, it's not much change. Less rake actually means less tyre lean angle, possibly providing larger contact patch at high lean angles. The below plot shows the difference between 23.5* rake (typical supersport/superbike) and 0 (straight up and down).
 |
| Blue = negative, white = zero |
What's apparent from the plot above is that, for all combinations of lean angle and handlebar angle, less rake = front tire leans less. Therefore, I'm going to say that less rake won't abuse the tire more, and may increase maximum grip.
The second effect rake angle has is the relationship between "actual tire steering angle" (the angle the contact patch makes with straight-ahead) and handlebar angle. Why does this matter? Feel, possibly.
Tires don't roll around corners like they are "on rails" (despite what some people describe after driving their cousin's slammed miata). Tires are flexible, so the tire is always "walking" slightly to the outside of the corner as it rolls. The angle between what an actual tire can steer vs. some imaginary tire on rails is what's called the slip angle.
The closer you get to the tire breaking loose and dropping your dumb ass on the pavement, the higher the slip angle. At the limit of grip, the front tire is squirming back and forth around the slip angle of maximum grip. This "squirming" causes the bike geometry to steer slightly back and forth to try to keep the bike from crashing. This squirm is fed back through the handlebars, and can be detected by the rider. The more the "squirming" is fed back through the handlebars, the earlier warning about an impending slide.
I call the ratio between actual contact-patch steering angle change and handlebar steering angle change the "slip angle sensitivity". More sensitivity = more information to the rider = better chance of keepin'er shiny. Obviously, changing rake angle changes this sensitivity, but how much?
In the above, red = 0* is more sensitive than 23.5*, while blue = 0* is less sensitive than 23.5* (white means no change). Large handlebar angles usually require small lean angles (parking lots) and large lean angles require small handlebar angles (kneedragging). I've highlighted the area in yellow where feedback is the most critical. You can see in this area that the reduction in sensitivity is very small (between 0~5%), which I'm going to call "not a problematic reduction". (Edit: the original plot showed the change in sensitivity as a "difference in percent", as "sensitivity" is a percentage value. It has been updated to a "percentage difference" with almost no change in result).The second effect rake angle has is the relationship between "actual tire steering angle" (the angle the contact patch makes with straight-ahead) and handlebar angle. Why does this matter? Feel, possibly.
Tires don't roll around corners like they are "on rails" (despite what some people describe after driving their cousin's slammed miata). Tires are flexible, so the tire is always "walking" slightly to the outside of the corner as it rolls. The angle between what an actual tire can steer vs. some imaginary tire on rails is what's called the slip angle.
The closer you get to the tire breaking loose and dropping your dumb ass on the pavement, the higher the slip angle. At the limit of grip, the front tire is squirming back and forth around the slip angle of maximum grip. This "squirming" causes the bike geometry to steer slightly back and forth to try to keep the bike from crashing. This squirm is fed back through the handlebars, and can be detected by the rider. The more the "squirming" is fed back through the handlebars, the earlier warning about an impending slide.
I call the ratio between actual contact-patch steering angle change and handlebar steering angle change the "slip angle sensitivity". More sensitivity = more information to the rider = better chance of keepin'er shiny. Obviously, changing rake angle changes this sensitivity, but how much?
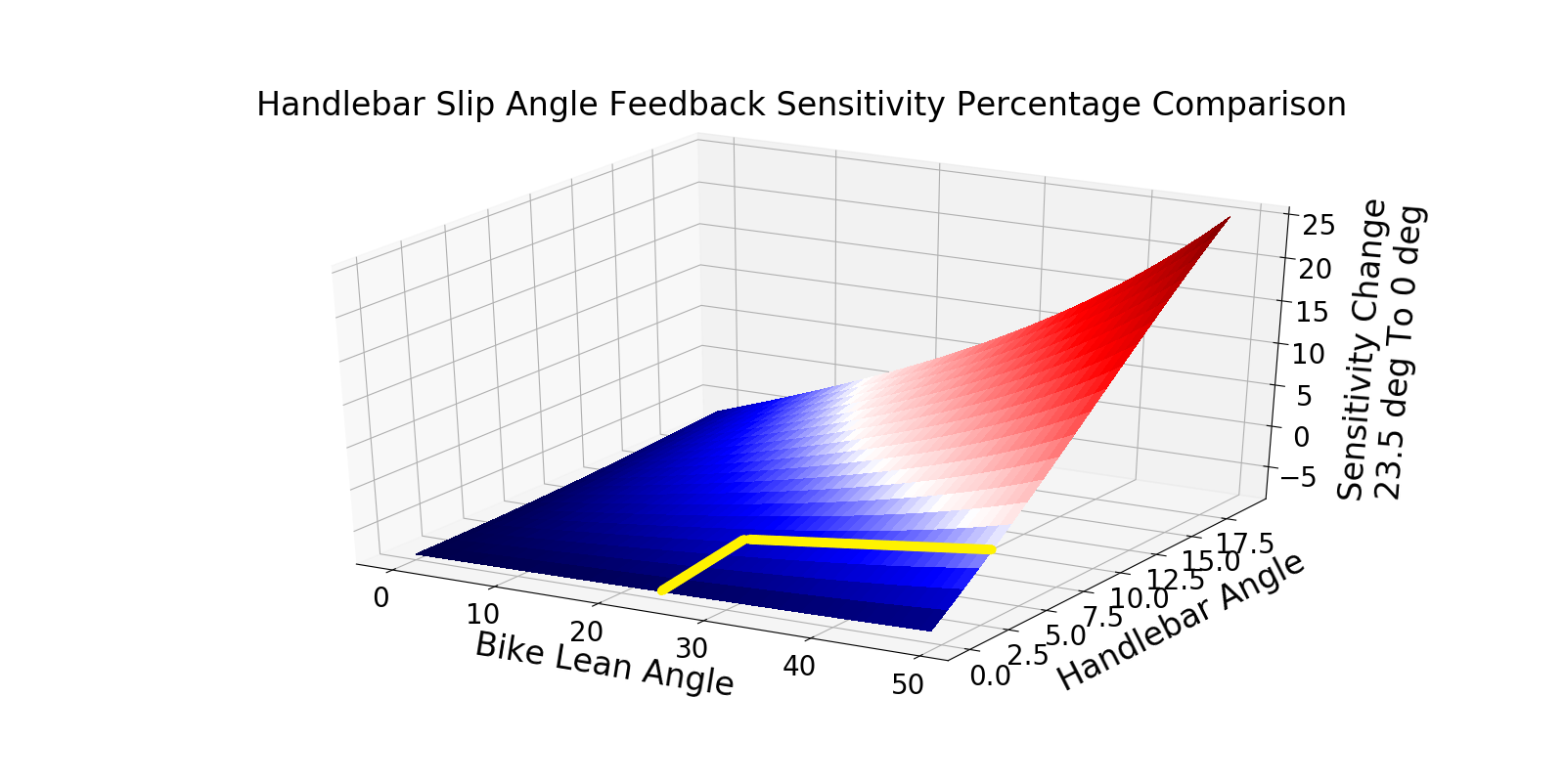 |
| Red = positive, blue = negative, white = zero |
So, it follows that I will choose whatever rake angle works the best with the suspension design, and also possibly what looks best when the upright is designed (this isn't a race bike build, and I'm not a slave to theoretical optimization. I'm a practical man!)
Neat.
ReplyDelete